Tutorial 6 - Tiltrotor eVTOL Aircraft Simulation#
Welcome to this tutorial on simulating a tiltrotor eVTOL aircraft using RCAIDE. This guide will walk you through the code, explain its components, and highlight where modifications can be made to customize the simulation for different vehicle designs.
Header and Imports#
The Imports section is divided into two parts: simulation-specific libraries and general-purpose Python libraries.
The RCAIDE Imports section includes the core modules needed for the simulation. These libraries provide specialized classes and tools for building, analyzing, and running aircraft models.
[1]:
'''
# Stopped_Rotor_EVTOL.py
#
# Created: May 2019, M Clarke
# Sep 2020, M. Clarke
'''
#----------------------------------------------------------------------
# Imports
# ---------------------------------------------------------------------
import RCAIDE
from RCAIDE.Framework.Core import Units
from RCAIDE.Library.Methods.Powertrain.Propulsors.Electric_Rotor import design_electric_rotor
from RCAIDE.Library.Plots import *
from RCAIDE import load
from RCAIDE import save
import os
import numpy as np
from copy import deepcopy
import matplotlib.pyplot as plt
import pickle
import sys
sys.path.insert(0,(os.path.dirname(os.getcwd())))
Vehicle Setup#
The ``vehicle_setup`` function defines the baseline configuration of the aircraft. This section builds the vehicle step-by-step by specifying its components, geometric properties, and high-level parameters.
1. Creating the Vehicle Instance#
The setup begins by creating a vehicle instance and assigning it a tag. The tag is a unique string identifier used to reference the vehicle during analysis or in post-processing steps.
2. Defining High-Level Vehicle Parameters#
The high-level parameters describe the aircraft’s key operational characteristics, such as:
Maximum Takeoff Weight: The heaviest allowable weight of the aircraft for safe flight.
Operating Empty Weight: The aircraft weight without fuel, passengers, or payload.
Payload: The weight of cargo and passengers.
Max Zero Fuel Weight: The maximum weight of the aircraft excluding fuel.
Units for these parameters can be converted automatically using the Units module to ensure consistency and reduce errors.
3. Defining the Landing Gear#
Landing gear parameters, such as the number of main and nose wheels, are set for the aircraft. While not used in this tutorial, these values can be applied in advanced analyses, such as ground loads or noise prediction.
4. Main Wing Setup#
The main wing is added using the ``Main_Wing`` class. This designation ensures that the primary lifting surface is recognized correctly by the analysis tools. Key properties of the wing include:
Area: The total wing surface area.
Span: The length of the wing from tip to tip.
Aspect Ratio: A ratio of span to average chord, determining wing efficiency.
Segments: Divisions of the wing geometry (e.g., root and tip sections).
Control Surfaces: High-lift devices like flaps and ailerons, defined by span fractions and deflections.
5. Horizontal and Vertical Stabilizers#
The stabilizers provide stability and control for the aircraft:
Horizontal Stabilizer: Defined using the
Horizontal_Tailclass. It follows a similar setup to the main wing but acts as a stabilizing surface.Vertical Stabilizer: Defined using the
Vertical_Tailclass, with an additional option to designate the tail as a T-tail for weight calculations.
6. Fuselage Definition#
The fuselage is modeled by specifying its geometric parameters, such as:
Length: The overall length of the aircraft body.
Width: The widest part of the fuselage cross-section.
Height: The height of the fuselage.
These values influence drag calculations and overall structural weight.
7. Energy Network#
The energy network models the propulsion system. The energy network determines the engine’s thrust, bypass ratio, and fuel type. These parameters are essential for performance and fuel efficiency analyses.
[2]:
# ----------------------------------------------------------------------
# Build the Vehicle
# ----------------------------------------------------------------------
def vehicle_setup() :
ospath = os.path.abspath(os.path.join('Notebook'))
separator = os.path.sep
rel_path = os.path.dirname(ospath) + separator + '..' + separator + '..' + separator + 'VnV' + separator + 'Vehicles' + separator
airfoil_path = rel_path
# ------------------------------------------------------------------
# Initialize the Vehicle
# ------------------------------------------------------------------
vehicle = RCAIDE.Vehicle()
vehicle.tag = 'Tiltrotor'
vehicle.configuration = 'eVTOL'
# ------------------------------------------------------------------
# Vehicle-level Properties
# ------------------------------------------------------------------
# mass properties
vehicle.mass_properties.takeoff = 2177
vehicle.mass_properties.operating_empty = 2177
vehicle.mass_properties.max_takeoff = 2177
vehicle.mass_properties.center_of_gravity = [[2.0144, 0. , 0. ]]
vehicle.reference_area = 10.39
vehicle.flight_envelope.ultimate_load = 5.7
vehicle.flight_envelope.positive_limit_load = 3.
vehicle.number_of_passengers = 5
# ------------------------------------------------------------------
# WINGS
# ------------------------------------------------------------------
# WING PROPERTIES
wing = RCAIDE.Library.Components.Wings.Main_Wing()
wing.tag = 'main_wing'
wing.aspect_ratio = 9.11
wing.sweeps.quarter_chord = 0.0
wing.thickness_to_chord = 0.15
wing.taper = 0.650
wing.spans.projected = 9.736
wing.chords.root = 1.57
wing.total_length = 1.57
wing.chords.tip = 0.66
wing.chords.mean_aerodynamic = 1.069
wing.dihedral = 0 * Units.degrees
wing.areas.reference = 10.39 * 2
wing.areas.wetted = 10.39 * 2
wing.areas.exposed = 10.39 * 2
wing.twists.root = 0 * Units.degrees
wing.twists.tip = 0 * Units.degrees
wing.origin = [[ 1.778,0 , 1.0 ]]
wing.aerodynamic_center = [ 1.8 ,0 , 1.0 ]
wing.winglet_fraction = 0.0
wing.symmetric = True
wing.vertical = False
# Segment
segment = RCAIDE.Library.Components.Wings.Segments.Segment()
segment.tag = 'Section_1'
segment.percent_span_location = 0.0
segment.twist = 4.0 * Units.degrees
segment.root_chord_percent = 1
segment.dihedral_outboard = 8. * Units.degrees
segment.sweeps.quarter_chord = 0. * Units.degrees
segment.thickness_to_chord = 0.15
wing.append_segment(segment)
# Segment
segment = RCAIDE.Library.Components.Wings.Segments.Segment()
segment.tag = 'Section_2'
segment.percent_span_location = 0.4875
segment.twist = 4.0 * Units.degrees
segment.root_chord_percent = 0.6496
segment.dihedral_outboard = 0. * Units.degrees
segment.sweeps.quarter_chord = 0. * Units.degrees
segment.thickness_to_chord = 0.135
wing.append_segment(segment)
# Segment
segment = RCAIDE.Library.Components.Wings.Segments.Segment()
segment.tag = 'Section_5'
segment.percent_span_location = 1.0
segment.twist = 0.
segment.root_chord_percent = 0.42038
segment.dihedral_outboard = 0. * Units.degrees
segment.sweeps.quarter_chord = 0. * Units.degrees
segment.thickness_to_chord = 0.12
wing.append_segment(segment)
vehicle.reference_area = wing.areas.reference
wing.areas.wetted = wing.areas.reference * 2
wing.areas.exposed = wing.areas.reference * 2
# control surfaces -------------------------------------------
flap = RCAIDE.Library.Components.Wings.Control_Surfaces.Flap()
flap.tag = 'flap'
flap.span_fraction_start = 0.2
flap.span_fraction_end = 0.5
flap.deflection = 0.0 * Units.degrees
flap.chord_fraction = 0.20
wing.append_control_surface(flap)
aileron = RCAIDE.Library.Components.Wings.Control_Surfaces.Aileron()
aileron.tag = 'aileron'
aileron.span_fraction_start = 0.7
aileron.span_fraction_end = 0.9
aileron.deflection = 0.0 * Units.degrees
aileron.chord_fraction = 0.2
wing.append_control_surface(aileron)
# add to vehicle
vehicle.append_component(wing)
# WING PROPERTIES
wing = RCAIDE.Library.Components.Wings.Horizontal_Tail()
wing.aspect_ratio = 4.27172
wing.sweeps.quarter_chord = 22.46 * Units.degrees
wing.thickness_to_chord = 0.15
wing.spans.projected = 3.6
wing.chords.root = 1.193
wing.total_length = 1.193
wing.chords.tip = 0.535
wing.taper = 0.44
wing.chords.mean_aerodynamic = 0.864
wing.dihedral = 45.0 * Units.degrees
wing.areas.reference = 4.25 * 2
wing.areas.wetted = 4.25 * 2
wing.areas.exposed = 4.25 * 2
wing.twists.root = 0 * Units.degrees
wing.twists.tip = 0 * Units.degrees
wing.origin = [[ 5.167, 0.0 ,0.470 ]]
wing.aerodynamic_center = [ 5.267, 0., 0.470 ]
wing.winglet_fraction = 0.0
wing.symmetric = True
elevator = RCAIDE.Library.Components.Wings.Control_Surfaces.Elevator()
elevator.tag = 'elevator'
elevator.span_fraction_start = 0.6
elevator.span_fraction_end = 0.9
elevator.deflection = 0.0 * Units.deg
elevator.chord_fraction = 0.4
wing.append_control_surface(elevator)
rudder = RCAIDE.Library.Components.Wings.Control_Surfaces.Rudder()
rudder.tag = 'rudder'
rudder.span_fraction_start = 0.1
rudder.span_fraction_end = 0.5
rudder.deflection = 0.0 * Units.deg
rudder.chord_fraction = 0.4
wing.append_control_surface(rudder)
# add to vehicle
vehicle.append_component(wing)
# ---------------------------------------------------------------
# FUSELAGE
# ---------------------------------------------------------------
# FUSELAGE PROPERTIES
fuselage = RCAIDE.Library.Components.Fuselages.Fuselage()
fuselage.tag = 'fuselage'
fuselage.seats_abreast = 2.
fuselage.seat_pitch = 3.
fuselage.fineness.nose = 0.88
fuselage.fineness.tail = 1.13
fuselage.lengths.nose = 0.5
fuselage.lengths.tail = 1.5
fuselage.lengths.cabin = 4.46
fuselage.lengths.total = 6.46
fuselage.width = 4.65 * Units.feet
fuselage.heights.maximum = 4.65 * Units.feet # change
fuselage.heights.at_quarter_length = 3.75 * Units.feet # change
fuselage.heights.at_wing_root_quarter_chord = 4.65 * Units.feet # change
fuselage.heights.at_three_quarters_length = 4.26 * Units.feet # change
fuselage.areas.wetted = 236. * Units.feet**2 # change
fuselage.areas.front_projected = 0.14 * Units.feet**2 # change
fuselage.effective_diameter = 1.276 # change
fuselage.differential_pressure = 0.
# Segment
segment = RCAIDE.Library.Components.Fuselages.Segments.Segment()
segment.tag = 'segment_0'
segment.percent_x_location = 0.0
segment.percent_z_location = 0. # change
segment.height = 0.049
segment.width = 0.032
fuselage.append_segment(segment)
# Segment
segment = RCAIDE.Library.Components.Fuselages.Segments.Segment()
segment.tag = 'segment_1'
segment.percent_x_location = 0.026
segment.percent_z_location = 0.00849
segment.height = 0.481
segment.width = 0.553
fuselage.append_segment(segment)
# Segment
segment = RCAIDE.Library.Components.Fuselages.Segments.Segment()
segment.tag = 'segment_2'
segment.percent_x_location = 0.074
segment.percent_z_location = 0.02874
segment.height = 1.00
segment.width = 0.912
fuselage.append_segment(segment)
# Segment
segment = RCAIDE.Library.Components.Fuselages.Segments.Segment()
segment.tag = 'segment_3'
segment.percent_x_location = 0.161
segment.percent_z_location = 0.04348
segment.height = 1.41
segment.width = 1.174
fuselage.append_segment(segment)
# Segment
segment = RCAIDE.Library.Components.Fuselages.Segments.Segment()
segment.tag = 'segment_4'
segment.percent_x_location = 0.284
segment.percent_z_location = 0.05435
segment.height = 1.62
segment.width = 1.276
fuselage.append_segment(segment)
# Segment
segment = RCAIDE.Library.Components.Fuselages.Segments.Segment()
segment.tag = 'segment_5'
segment.percent_x_location = 0.531
segment.percent_z_location = 0.0510
segment.height = 1.409
segment.width = 1.121
fuselage.append_segment(segment)
# Segment
segment = RCAIDE.Library.Components.Fuselages.Segments.Segment()
segment.tag = 'segment_6'
segment.percent_x_location = 0.651
segment.percent_z_location = 0.05636
segment.height = 1.11
segment.width = 0.833
fuselage.append_segment(segment)
# Segment
segment = RCAIDE.Library.Components.Fuselages.Segments.Segment()
segment.tag = 'segment_7'
segment.percent_x_location = 0.773
segment.percent_z_location = 0.06149
segment.height = 0.78
segment.width = 0.512
fuselage.append_segment(segment)
# Segment
segment = RCAIDE.Library.Components.Fuselages.Segments.Segment()
segment.tag = 'segment_8'
segment.percent_x_location = 1.
segment.percent_z_location = 0.07352
segment.height = 0.195
segment.width = 0.130
fuselage.append_segment(segment)
vehicle.append_component(fuselage)
#------------------------------------------------------------------------------------------------------------------------------------
# ######################################################## Energy Network #########################################################
#------------------------------------------------------------------------------------------------------------------------------------
# define network
network = RCAIDE.Framework.Networks.Electric()
network.charging_power = 1000
#====================================================================================================================================
# Tilt Rotor Bus
#====================================================================================================================================
bus = RCAIDE.Library.Components.Powertrain.Distributors.Electrical_Bus()
bus.tag = 'bus'
bus.number_of_battery_modules = 4
#------------------------------------------------------------------------------------------------------------------------------------
# Bus Battery
#------------------------------------------------------------------------------------------------------------------------------------
battery_module = RCAIDE.Library.Components.Powertrain.Sources.Battery_Modules.Lithium_Ion_NMC()
battery_module.tag = 'bus_battery'
battery_module.electrical_configuration.series = 35
battery_module.electrical_configuration.parallel = 100
battery_module.geometric_configuration.normal_count = 140
battery_module.geometric_configuration.parallel_count = 25
battery_module.geometric_configuration.stacking_rows = 2
# starboard | port | front | rear
modules_origins = [[1.8, 2.0,1.0 ],[1.8, -2.0, 1.0 ],[0.5, 0.0, 0.0 ],[3.5, 0.0, 0.0]]
orientation = [[0, 0.0, np.pi],[0, 0.0, np.pi ],[0, 0.0, 0 ],[0, 0.0,0 ]]
for m_i in range(bus.number_of_battery_modules):
module = deepcopy(battery_module)
module.tag = 'nmc_module_' + str(m_i+1)
module.origin = [modules_origins[m_i]]
module.orientation_euler_angles = orientation[m_i]
bus.battery_modules.append(module)
bus.initialize_bus_properties()
#------------------------------------------------------------------------------------------------------------------------------------
# Lift Propulsors
#------------------------------------------------------------------------------------------------------------------------------------
# Define Lift Propulsor Container
propulsor = RCAIDE.Library.Components.Powertrain.Propulsors.Electric_Rotor()
propulsor.tag = 'propulsor'
# Electronic Speed Controller
prop_rotor_esc = RCAIDE.Library.Components.Powertrain.Modulators.Electronic_Speed_Controller()
prop_rotor_esc.efficiency = 0.95
prop_rotor_esc.bus_voltage = bus.voltage
prop_rotor_esc.tag = 'prop_rotor_esc_1'
propulsor.electronic_speed_controller = prop_rotor_esc
# Lift Rotor Design
g = 9.81 # gravitational acceleration
Hover_Load = vehicle.mass_properties.takeoff*g *1.1 # hover load
prop_rotor = RCAIDE.Library.Components.Powertrain.Converters.Prop_Rotor()
prop_rotor.tag = 'prop_rotor'
prop_rotor.tip_radius = 3/2
prop_rotor.hub_radius = 0.15 * prop_rotor.tip_radius
prop_rotor.number_of_blades = 4
prop_rotor.hover.design_altitude = 40 * Units.feet
prop_rotor.hover.design_thrust = Hover_Load/6
prop_rotor.hover.design_freestream_velocity = np.sqrt(prop_rotor.hover.design_thrust/(2*1.2*np.pi*(prop_rotor.tip_radius**2)))
prop_rotor.oei.design_altitude = 40 * Units.feet
prop_rotor.oei.design_thrust = Hover_Load/5
prop_rotor.oei.design_freestream_velocity = np.sqrt(prop_rotor.oei.design_thrust/(2*1.2*np.pi*(prop_rotor.tip_radius**2)))
prop_rotor.cruise.design_altitude = 1500 * Units.feet
prop_rotor.cruise.design_thrust = 3150 / 6
prop_rotor.cruise.design_freestream_velocity = 130.* Units['mph']
airfoil = RCAIDE.Library.Components.Airfoils.Airfoil()
airfoil.coordinate_file = airfoil_path + 'Airfoils' + separator + 'NACA_4412.txt'
airfoil.polar_files = [airfoil_path + 'Airfoils' + separator + 'Polars' + separator + 'NACA_4412_polar_Re_50000.txt' ,
airfoil_path + 'Airfoils' + separator + 'Polars' + separator + 'NACA_4412_polar_Re_100000.txt' ,
airfoil_path + 'Airfoils' + separator + 'Polars' + separator + 'NACA_4412_polar_Re_200000.txt' ,
airfoil_path + 'Airfoils' + separator + 'Polars' + separator + 'NACA_4412_polar_Re_500000.txt' ,
airfoil_path + 'Airfoils' + separator + 'Polars' + separator + 'NACA_4412_polar_Re_1000000.txt',
airfoil_path + 'Airfoils' + separator + 'Polars' + separator + 'NACA_4412_polar_Re_3500000.txt',
airfoil_path + 'Airfoils' + separator + 'Polars' + separator + 'NACA_4412_polar_Re_5000000.txt',
airfoil_path + 'Airfoils' + separator + 'Polars' + separator + 'NACA_4412_polar_Re_7500000.txt' ]
prop_rotor.append_airfoil(airfoil)
prop_rotor.airfoil_polar_stations = [0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0]
propulsor.rotor = prop_rotor
#------------------------------------------------------------------------------------------------------------------------------------
# Lift Rotor Motor
#------------------------------------------------------------------------------------------------------------------------------------
prop_rotor_motor = RCAIDE.Library.Components.Powertrain.Converters.DC_Motor()
prop_rotor_motor.efficiency = 0.98
prop_rotor_motor.nominal_voltage = bus.voltage * 0.8
prop_rotor_motor.no_load_current = 0.01
propulsor.motor = prop_rotor_motor
#------------------------------------------------------------------------------------------------------------------------------------
# Lift Rotor Nacelle
#------------------------------------------------------------------------------------------------------------------------------------
nacelle = RCAIDE.Library.Components.Nacelles.Nacelle()
nacelle.length = 0.45
nacelle.diameter = 0.3
nacelle.flow_through = False
propulsor.nacelle = nacelle
design_electric_rotor(propulsor)
# Front Rotors Locations
origins =[[0.208, -1.848, 1.195],[0.208, 1.848, 1.195],
[1.505,5.000,1.320],[1.505,-5.000,1.320],
[ 5.318, 1.848, 2.282],[ 5.318, -1.848, 2.282]]
assigned_propulsor_list = []
for i in range(len(origins)):
propulsor_i = deepcopy(propulsor)
propulsor_i.tag = 'prop_rotor_propulsor_' + str(i + 1)
propulsor_i.rotor.tag = 'prop_rotor_' + str(i + 1)
propulsor_i.rotor.origin = [origins[i]]
propulsor_i.motor.tag = 'prop_rotor_motor_' + str(i + 1)
propulsor_i.motor.origin = [origins[i]]
propulsor_i.electronic_speed_controller.tag = 'prop_rotor_esc_' + str(i + 1)
propulsor_i.electronic_speed_controller.origin = [origins[i]]
propulsor_i.nacelle.tag = 'prop_rotor_nacelle_' + str(i + 1)
propulsor_i.nacelle.origin = [origins[i]]
network.propulsors.append(propulsor_i)
assigned_propulsor_list.append(propulsor_i.tag)
bus.assigned_propulsors = [assigned_propulsor_list]
# Avionics
avionics = RCAIDE.Library.Components.Powertrain.Systems.Avionics()
avionics.power_draw = 10. # Watts
avionics.mass_properties.mass = 1.0 * Units.kg
bus.avionics = avionics
network.busses.append(bus)
# append energy network
vehicle.append_energy_network(network)
return vehicle
Configurations Setup#
The ``configs_setup`` function defines the different vehicle configurations (referred to as configs) used during the simulation. Configurations allow for modifications to the baseline vehicle, such as altering control surface settings, without redefining the entire vehicle.
1. Base Configuration#
The base configuration serves as the foundation for all other configurations. It is defined to match the baseline vehicle created in the vehicle_setup function. Configurations in RCAIDE are created as containers using RCAIDE Data classes. These classes provide additional functionality, such as the ability to append new configurations or modifications.
2. Cruise Configuration#
The cruise configuration demonstrates that new configurations can inherit properties directly from existing configurations (e.g., the base config). This avoids redundancy and ensures consistency across configurations.
The cruise configuration typically reflects the clean flight condition, with no high-lift devices like flaps or slats deployed.
3. Remaining Configurations#
The remaining configurations, such as climb, approach, and hover, follow a similar pattern:
Hover Climb
Hover-to-Cruise
Approach
Hover
Each configuration is built upon the previous one or the base configuration, ensuring modularity and easy customization.
[3]:
def configs_setup(vehicle):
'''
The configration set up below the scheduling of the nacelle angle and vehicle speed.
Since one prop_rotor operates at varying flight conditions, one must perscribe the
pitch command of the prop_rotor which us used in the variable pitch model in the analyses
Note: low pitch at take off & low speeds, high pitch at cruise
'''
# ------------------------------------------------------------------
# Initialize Configurations
# ------------------------------------------------------------------
configs = RCAIDE.Library.Components.Configs.Config.Container()
base_config = RCAIDE.Library.Components.Configs.Config(vehicle)
base_config.tag = 'base'
configs.append(base_config)
# ------------------------------------------------------------------
# Hover Climb Configuration
# ------------------------------------------------------------------
config = RCAIDE.Library.Components.Configs.Config(vehicle)
config.tag = 'vertical_climb'
vector_angle = 90.0 * Units.degrees
for network in config.networks:
for propulsor in network.propulsors:
propulsor.rotor.orientation_euler_angles = [0, vector_angle, 0]
configs.append(config)
# ------------------------------------------------------------------
#
# ------------------------------------------------------------------
config = RCAIDE.Library.Components.Configs.Config(vehicle)
vector_angle = 75.0 * Units.degrees
config.tag = 'vertical_transition'
for network in config.networks:
for propulsor in network.propulsors:
propulsor.rotor.orientation_euler_angles = [0, vector_angle, 0]
propulsor.rotor.blade_pitch_command = propulsor.rotor.hover.design_blade_pitch_command * 0.5
configs.append(config)
# ------------------------------------------------------------------
# Hover-to-Cruise Configuration
# ------------------------------------------------------------------
config = RCAIDE.Library.Components.Configs.Config(vehicle)
config.tag = 'low_speed_climb_transition'
vector_angle = 45.0 * Units.degrees
for network in config.networks:
for propulsor in network.propulsors:
propulsor.rotor.orientation_euler_angles = [0, vector_angle, 0]
propulsor.rotor.blade_pitch_command = propulsor.rotor.cruise.design_blade_pitch_command * 0.5
configs.append(config)
# ------------------------------------------------------------------
# Hover-to-Cruise Configuration
# ------------------------------------------------------------------
config = RCAIDE.Library.Components.Configs.Config(vehicle)
config.tag = 'high_speed_climb_transition'
vector_angle = 5.0 * Units.degrees
for network in config.networks:
for propulsor in network.propulsors:
propulsor.rotor.orientation_euler_angles = [0, vector_angle, 0]
propulsor.rotor.blade_pitch_command = propulsor.rotor.cruise.design_blade_pitch_command
configs.append(config)
# ------------------------------------------------------------------
# Cruise Configuration
# ------------------------------------------------------------------
config = RCAIDE.Library.Components.Configs.Config(vehicle)
config.tag = 'cruise'
vector_angle = 0.0 * Units.degrees
for network in config.networks:
for propulsor in network.propulsors:
propulsor.rotor.orientation_euler_angles = [0, vector_angle, 0]
propulsor.rotor.blade_pitch_command = propulsor.rotor.cruise.design_blade_pitch_command
configs.append(config)
# ------------------------------------------------------------------
# Approach Configuration
# ------------------------------------------------------------------
config = RCAIDE.Library.Components.Configs.Config(vehicle)
config.tag = 'approach_transition'
vector_angle = 85.0 * Units.degrees
for network in config.networks:
for propulsor in network.propulsors:
propulsor.rotor.orientation_euler_angles = [0, vector_angle, 0]
propulsor.rotor.blade_pitch_command = propulsor.rotor.hover.design_blade_pitch_command
configs.append(config)
# ------------------------------------------------------------------
# Hover Configuration
# ------------------------------------------------------------------
config = RCAIDE.Library.Components.Configs.Config(vehicle)
config.tag = 'vertical_descent'
vector_angle = 90.0 * Units.degrees
for network in config.networks:
for propulsor in network.propulsors:
propulsor.rotor.orientation_euler_angles = [0, vector_angle, 0]
configs.append(config)
return configs
Base Analysis#
The ``base_analysis`` function defines the analyses required for evaluating the aircraft. Each analysis addresses a specific aspect of the vehicle’s performance or characteristics. Below are the key analyses, their purpose, and considerations for their use.
1. Weights Analysis#
The weights analysis calculates the distribution of the aircraft’s weight across various components. This method is based on empirical correlations designed for tube-and-wing transport aircraft configurations.
Provides a breakdown of component weights (e.g., wings, fuselage, engines).
While informative, the results of this analysis are not directly used in the performance evaluation.
2. Aerodynamics Analysis#
The aerodynamics analysis evaluates the aerodynamic performance of the aircraft. It uses RCAIDE’s fidelity zero method:
Fidelity Zero: This is RCAIDE’s baseline aerodynamic analysis method, suitable for subsonic transport aircraft.
Similar to aerodynamic methods found in conceptual design texts.
Provides estimates for lift, drag, and other aerodynamic coefficients.
Note: Higher-fidelity aerodynamic methods are available for more detailed analyses if needed.
3. Stability Analysis#
The stability analysis calculates stability derivatives for the aircraft. While it is not used in the current mission setup, it can be run post-mission for checks or additional analysis.
Like the aerodynamic method, it uses fidelity zero for baseline stability analysis.
Applicable for basic stability checks of subsonic transport aircraft.
4. Energy Analysis#
The energy analysis runs the energy network attached to the vehicle. For this turboprop-powered aircraft:
The analysis evaluates the turboprop energy network.
Ensures the propulsion system behavior, such as thrust and fuel consumption, is accounted for.
5. Planet Analysis#
The planet analysis defines the planetary environment the vehicle operates in. This setup allows for the attachment of an atmospheric model.
6. Atmosphere Analysis#
The atmosphere analysis sets the atmospheric conditions for the simulation. A common choice is the US 1976 Standard Atmosphere, which provides:
Standard temperature, pressure, and density profiles with altitude.
Consistent atmospheric conditions for performance evaluations.
[4]:
def base_analysis(vehicle):
# ------------------------------------------------------------------
# Initialize the Analyses
# ------------------------------------------------------------------
analyses = RCAIDE.Framework.Analyses.Vehicle()
analyses.vehicle = vehicle
# Geometry
geometry = RCAIDE.Framework.Analyses.Geometry.Geometry()
geometry.settings.overwrite_reference = True
geometry.settings.update_wing_properties = True
analyses.append(geometry)
# ------------------------------------------------------------------
# Weights
weights = RCAIDE.Framework.Analyses.Weights.Electric_VTOL()
weights.aircraft_type = "VTOL"
analyses.append(weights)
# ------------------------------------------------------------------
# Aerodynamics Analysis
aerodynamics = RCAIDE.Framework.Analyses.Aerodynamics.Vortex_Lattice_Method()
aerodynamics.training.Mach = np.array([0.1 ,0.3, 0.5, 0.65 , 0.85])
analyses.append(aerodynamics)
# ------------------------------------------------------------------
# Stability Analysis
# stability = RCAIDE.Framework.Analyses.Stability.Vortex_Lattice_Method()
# analyses.append(stability)
# ------------------------------------------------------------------
# Energy
energy = RCAIDE.Framework.Analyses.Energy.Energy()
analyses.append(energy)
# ------------------------------------------------------------------
# Planet Analysis
planet = RCAIDE.Framework.Analyses.Planets.Earth()
analyses.append(planet)
# ------------------------------------------------------------------
# Atmosphere Analysis
atmosphere = RCAIDE.Framework.Analyses.Atmospheric.US_Standard_1976()
analyses.append(atmosphere)
# done!
return analyses
Analyses Setup#
The ``analyses_setup`` function assigns a set of analyses to each vehicle configuration. Analyses are used to evaluate the aircraft’s performance, aerodynamics, energy systems, and other characteristics for a given configuration.
1. Overview of Analyses Assignment#
In this tutorial, all configurations share the same set of analyses. However, this function provides the flexibility to assign a unique set of analyses to any specific configuration.
2. Purpose of Analyses Assignment#
The analyses ensure that the defined vehicle configurations (e.g., cruise, takeoff, landing) are evaluated correctly during the simulation. Each configuration can have:
Common Analyses: Shared across multiple configurations for simplicity.
Custom Analyses: Tailored to a specific phase of flight or performance evaluation.
3. Typical Analyses Included#
The following analyses are typically assigned to each configuration:
Weights Analysis: Computes weight distribution across components.
Aerodynamics Analysis: Estimates lift, drag, and aerodynamic coefficients.
Stability Analysis: Evaluates stability derivatives for flight control assessments.
Energy Analysis: Runs the energy network (e.g., turboprop engine) for thrust and fuel performance.
Atmosphere Analysis: Sets atmospheric conditions using standard atmospheric models.
By assigning these analyses, the vehicle’s behavior under different configurations (e.g., cruise, takeoff, landing) can be comprehensively evaluated.
4. Customizing Analyses#
To assign a custom analysis set for a specific configuration:
Define a new analysis function tailored to the desired evaluation.
Replace the default analyses for the target configuration by calling the custom function.
For example, the takeoff configuration might use a modified aerodynamic analysis to account for flap and slat deployment.
[5]:
def analyses_setup(configs):
analyses = RCAIDE.Framework.Analyses.Analysis.Container()
# build a base analysis for each config
for tag,config in configs.items():
analysis = base_analysis(config)
if config.networks.electric.propulsors['prop_rotor_propulsor_1'].rotor.orientation_euler_angles[1] > 45*Units.degrees:
analysis.aerodynamics.settings.drag_coefficient_increment = 0.10
elif config.networks.electric.propulsors['prop_rotor_propulsor_1'].rotor.orientation_euler_angles[1] > 15*Units.degrees:
analysis.aerodynamics.settings.drag_coefficient_increment = 0.05
analyses[tag] = analysis
return analyses
Mission Setup#
The ``mission_setup`` function defines the mission profile used to compute the aircraft’s performance. A mission profile consists of sequential segments that represent different phases of flight, such as climb, cruise, and descent.
1. Mission Profile Overview#
A mission profile is made up of individual flight segments. Each segment specifies the aircraft’s flight conditions, such as:
Altitude
Speed
Range
Time
These segments are simulated sequentially, allowing for a detailed performance analysis of the vehicle across all phases of flight.
2. Segments in the Mission Profile#
Common segments in a mission profile include:
Taxi: Ground movement of the aircraft before takeoff and after landing.
Takeoff: Acceleration and lift-off phase with high-lift devices deployed.
Climb: Gradual ascent to cruise altitude, often with reduced flap/slat deployment.
Cruise: Level flight at a constant altitude and speed for fuel-efficient operation.
Descent: Controlled reduction in altitude as the aircraft prepares for landing.
Landing: Final phase of flight with maximum flap and slat deployment for touchdown.
Each segment defines specific performance conditions and parameters, such as speed, altitude, and duration.
For more information on the mission solver and its implementation, refer to the relevant RCAIDE documentation.
[6]:
# ----------------------------------------------------------------------
# Define the Mission
# ----------------------------------------------------------------------
def mission_setup(analyses ):
# ------------------------------------------------------------------
# Initialize the Mission
# ------------------------------------------------------------------
mission = RCAIDE.Framework.Mission.Sequential_Segments()
mission.tag = 'mission'
# unpack Segments module
Segments = RCAIDE.Framework.Mission.Segments
base_segment = Segments.Segment()
# ------------------------------------------------------------------
# First Climb Segment: Constant Speed, Constant Rate
# ------------------------------------------------------------------
segment = Segments.Vertical_Flight.Climb(base_segment)
segment.tag = "Vertical_Climb"
segment.analyses.extend(analyses.vertical_climb)
segment.altitude_start = 0.0 * Units.ft
segment.altitude_end = 50. * Units.ft
segment.climb_rate = 300. * Units['ft/min']
segment.initial_battery_state_of_charge = 1.0
segment.state.numerics.solver.type = 'root_finder'
# define flight dynamics to model
segment.flight_dynamics.force_z = True
# define flight controls
segment.assigned_control_variables.throttle.active = True
segment.assigned_control_variables.throttle.assigned_propulsors = [['prop_rotor_propulsor_1','prop_rotor_propulsor_2','prop_rotor_propulsor_3',
'prop_rotor_propulsor_4','prop_rotor_propulsor_5','prop_rotor_propulsor_6']]
mission.append_segment(segment)
# ------------------------------------------------------------------
# First Transition Segment
# ------------------------------------------------------------------
segment = Segments.Cruise.Constant_Acceleration_Constant_Altitude(base_segment)
segment.tag = "Vertical_Transition"
segment.analyses.extend( analyses.vertical_transition)
segment.air_speed_end = 35 * Units['mph']
segment.acceleration = 1.0
# define flight dynamics to model
segment.flight_dynamics.force_x = True
segment.flight_dynamics.force_z = True
# define flight controls
segment.assigned_control_variables.throttle.active = True
segment.assigned_control_variables.throttle.assigned_propulsors = [['prop_rotor_propulsor_1','prop_rotor_propulsor_2','prop_rotor_propulsor_3',
'prop_rotor_propulsor_4','prop_rotor_propulsor_5','prop_rotor_propulsor_6']]
segment.assigned_control_variables.pitch_angle.active = True
mission.append_segment(segment)
# ------------------------------------------------------------------
# First Cruise Segment: Constant Acceleration, Constant Altitude
# ------------------------------------------------------------------
segment = Segments.Climb.Linear_Speed_Constant_Rate(base_segment)
segment.tag = "low_speed_climb_transition"
segment.analyses.extend(analyses.low_speed_climb_transition)
segment.climb_rate = 822. * Units['ft/min']
segment.air_speed_end = 100 * Units['mph']
segment.altitude_end = 500.0 * Units.ft
# define flight dynamics to model
segment.flight_dynamics.force_x = True
segment.flight_dynamics.force_z = True
# define flight controls
segment.assigned_control_variables.throttle.active = True
segment.assigned_control_variables.throttle.assigned_propulsors = [['prop_rotor_propulsor_1','prop_rotor_propulsor_2','prop_rotor_propulsor_3',
'prop_rotor_propulsor_4','prop_rotor_propulsor_5','prop_rotor_propulsor_6']]
segment.assigned_control_variables.pitch_angle.active = True
mission.append_segment(segment)
# ------------------------------------------------------------------
# Second Transition Segment
# ------------------------------------------------------------------
segment = Segments.Cruise.Constant_Acceleration_Constant_Altitude(base_segment)
segment.tag = "high_speed_climb_transition"
segment.analyses.extend( analyses.high_speed_climb_transition)
segment.air_speed_end = 125. * Units['mph']
segment.acceleration = 9.81/5
# define flight dynamics to model
segment.flight_dynamics.force_x = True
segment.flight_dynamics.force_z = True
# define flight controls
segment.assigned_control_variables.throttle.active = True
segment.assigned_control_variables.throttle.assigned_propulsors = [['prop_rotor_propulsor_1','prop_rotor_propulsor_2','prop_rotor_propulsor_3',
'prop_rotor_propulsor_4','prop_rotor_propulsor_5','prop_rotor_propulsor_6']]
segment.assigned_control_variables.pitch_angle.active = True
mission.append_segment(segment)
# ------------------------------------------------------------------
# First Cruise Segment: Constant Acceleration, Constant Altitude
# ------------------------------------------------------------------
segment = Segments.Climb.Linear_Speed_Constant_Rate(base_segment)
segment.tag = "Climb"
segment.analyses.extend(analyses.cruise)
segment.climb_rate = 500. * Units['ft/min']
segment.air_speed_start = 90. * Units.kts
segment.air_speed_end = 125. * Units['mph']
segment.altitude_end = 1000.0 * Units.ft
segment.state.numerics.solver.type = 'root_finder'
# define flight dynamics to model
segment.flight_dynamics.force_x = True
segment.flight_dynamics.force_z = True
# define flight controls
segment.assigned_control_variables.throttle.active = True
segment.assigned_control_variables.throttle.assigned_propulsors =[['prop_rotor_propulsor_1','prop_rotor_propulsor_2','prop_rotor_propulsor_3',
'prop_rotor_propulsor_4','prop_rotor_propulsor_5','prop_rotor_propulsor_6']]
segment.assigned_control_variables.pitch_angle.active = True
mission.append_segment(segment)
# ------------------------------------------------------------------
# First Cruise Segment: Constant Acceleration, Constant Altitude
# ------------------------------------------------------------------
segment = Segments.Cruise.Constant_Speed_Constant_Altitude(base_segment)
segment.tag = "Cruise"
segment.analyses.extend(analyses.cruise)
segment.altitude = 1000.0 * Units.ft
segment.air_speed = 125. * Units['mph']
segment.distance = 90*Units.nmi
segment.state.numerics.solver.type = 'root_finder'
# define flight dynamics to model
segment.flight_dynamics.force_x = True
segment.flight_dynamics.force_z = True
# define flight controls
segment.assigned_control_variables.throttle.active = True
segment.assigned_control_variables.throttle.initial_guess_values = [[0.8]]
segment.assigned_control_variables.throttle.assigned_propulsors = [['prop_rotor_propulsor_1','prop_rotor_propulsor_2','prop_rotor_propulsor_3',
'prop_rotor_propulsor_4','prop_rotor_propulsor_5','prop_rotor_propulsor_6']]
segment.assigned_control_variables.pitch_angle.active = True
mission.append_segment(segment)
# ------------------------------------------------------------------
# Descent Segment: Constant Acceleration, Constant Altitude
# ------------------------------------------------------------------
segment = Segments.Climb.Linear_Speed_Constant_Rate(base_segment)
segment.tag = "Descent"
segment.analyses.extend(analyses.cruise)
segment.climb_rate = -300. * Units['ft/min']
segment.air_speed_start = 125. * Units['mph']
segment.air_speed_end = 90 * Units.kts
segment.altitude_start = 1000.0 * Units.ft
segment.altitude_end = 500.0 * Units.ft
segment.state.numerics.solver.type = 'root_finder'
# define flight dynamics to model
segment.flight_dynamics.force_x = True
segment.flight_dynamics.force_z = True
# define flight controls
segment.assigned_control_variables.throttle.active = True
segment.assigned_control_variables.throttle.assigned_propulsors = [['prop_rotor_propulsor_1','prop_rotor_propulsor_2','prop_rotor_propulsor_3',
'prop_rotor_propulsor_4','prop_rotor_propulsor_5','prop_rotor_propulsor_6']]
segment.assigned_control_variables.pitch_angle.active = True
mission.append_segment(segment)
# ------------------------------------------------------------------
# Forth Transition Segment
# ------------------------------------------------------------------
segment = Segments.Descent.Linear_Speed_Constant_Rate(base_segment)
segment.tag = "Approach_Transition"
segment.analyses.extend(analyses.approach_transition)
segment.climb_rate = -200. * Units['ft/min']
segment.air_speed_start = 90 * Units.kts
segment.air_speed_end = 20. * Units.kts
segment.altitude_start = 500 * Units.feet
segment.altitude_end = 50.0 * Units.ft
# define flight dynamics to model
segment.flight_dynamics.force_x = True
segment.flight_dynamics.force_z = True
# define flight controls
segment.assigned_control_variables.throttle.active = True
segment.assigned_control_variables.throttle.assigned_propulsors = [['prop_rotor_propulsor_1','prop_rotor_propulsor_2','prop_rotor_propulsor_3',
'prop_rotor_propulsor_4','prop_rotor_propulsor_5','prop_rotor_propulsor_6']]
segment.assigned_control_variables.pitch_angle.active = True
mission.append_segment(segment)
#------------------------------------------------------------------------------------------------------------------------------------
# Vertical Descent
#------------------------------------------------------------------------------------------------------------------------------------
segment = Segments.Vertical_Flight.Descent(base_segment)
segment.tag = "Vertical_Descent"
segment.analyses.extend( analyses.vertical_descent)
segment.altitude_end = 0. * Units.ft
segment.descent_rate = 300. * Units['ft/min']
segment.state.numerics.solver.type = 'root_finder'
# define flight dynamics to model
segment.flight_dynamics.force_z = True
# define flight controls
segment.assigned_control_variables.throttle.active = True
segment.assigned_control_variables.throttle.assigned_propulsors = [['prop_rotor_propulsor_1','prop_rotor_propulsor_2','prop_rotor_propulsor_3',
'prop_rotor_propulsor_4','prop_rotor_propulsor_5','prop_rotor_propulsor_6']]
mission.append_segment(segment)
return mission
Missions Setup#
The missions_setup function is responsible for setting up a list of missions. This allows multiple missions to be incorporated if desired, but only one is used here.
Initialize Missions Object: It creates an empty
Missionsobject from theRCAIDE.Framework.Missionmodule.Tag the Mission: It assigns the tag
'base_mission'to the providedmissionobject. This tag is used to identify the mission.Add Mission to List: It adds the tagged
missionto theMissionsobject.Return Missions Object: Finally, it returns the
Missionsobject, which now contains the tagged mission.
[7]:
def missions_setup(mission):
missions = RCAIDE.Framework.Mission.Missions()
# base mission
mission.tag = 'base_mission'
missions.append(mission)
return missions
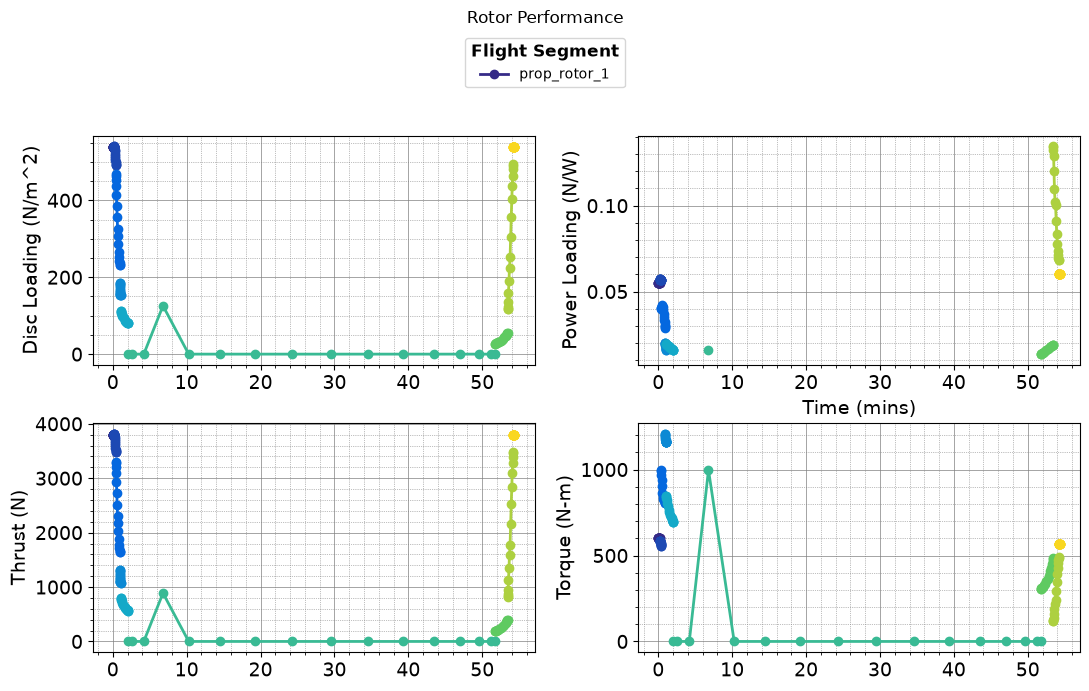
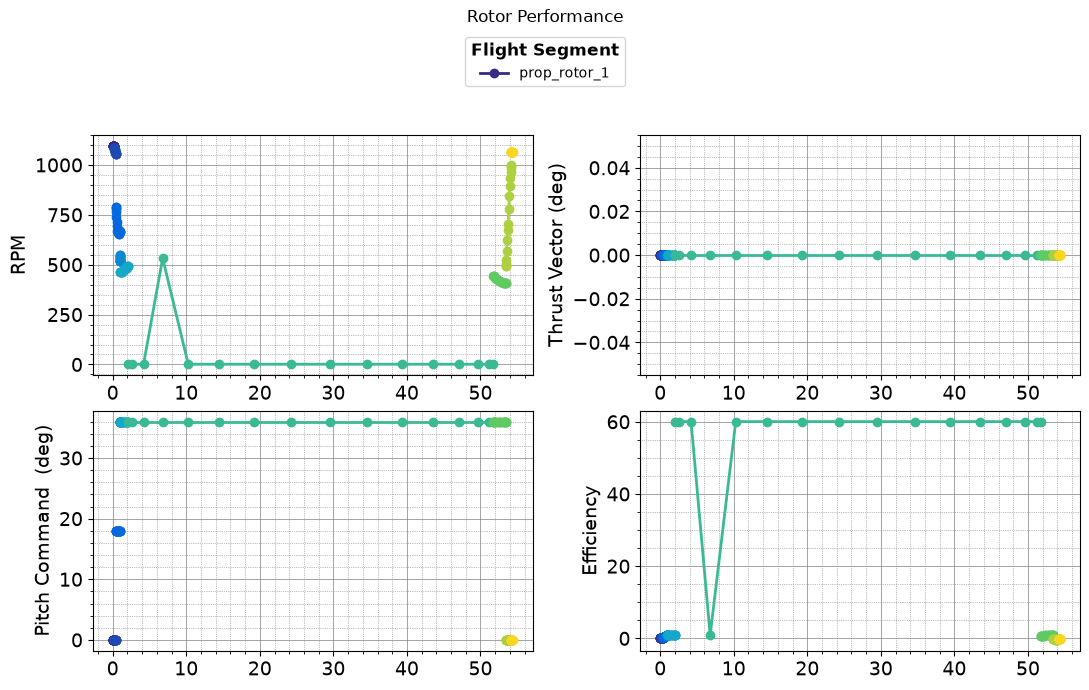
Plot Mission#
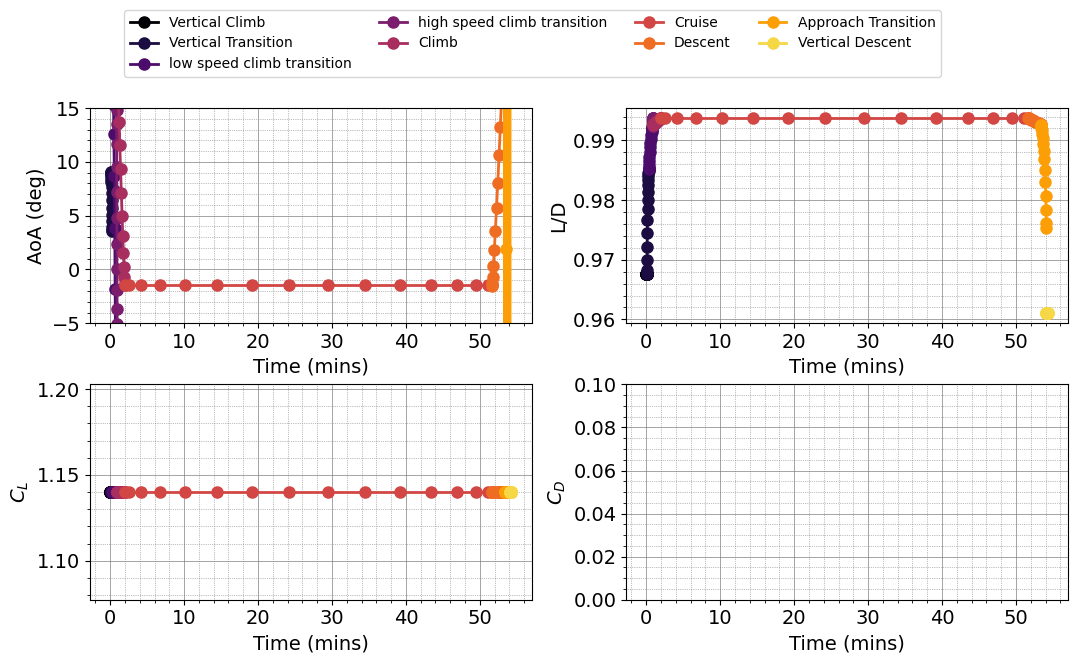
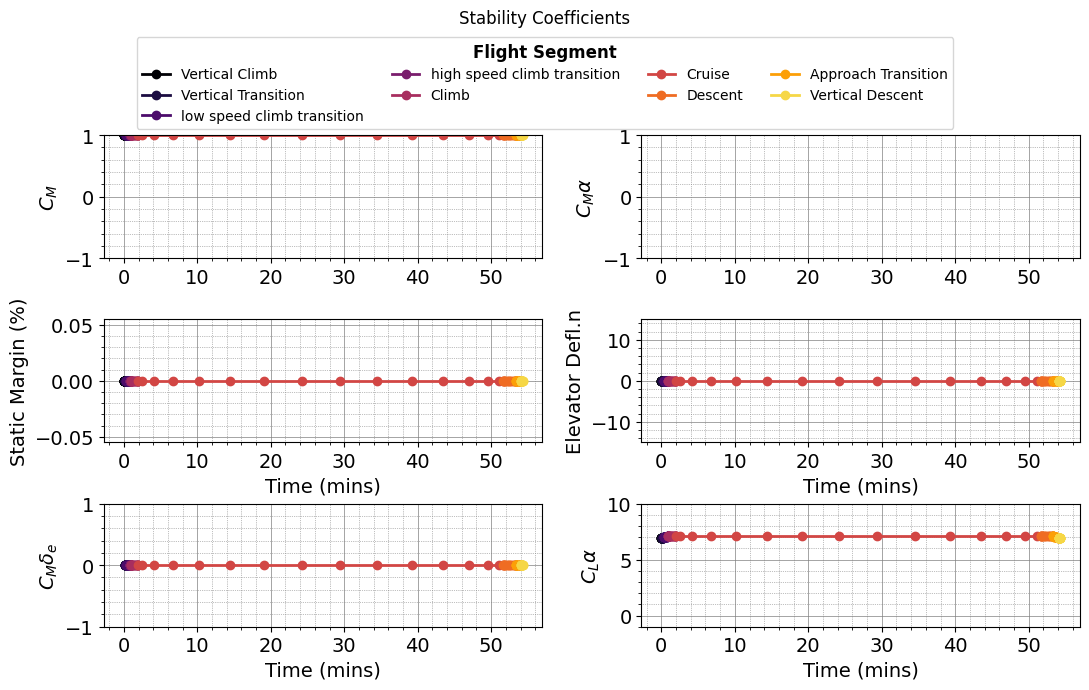
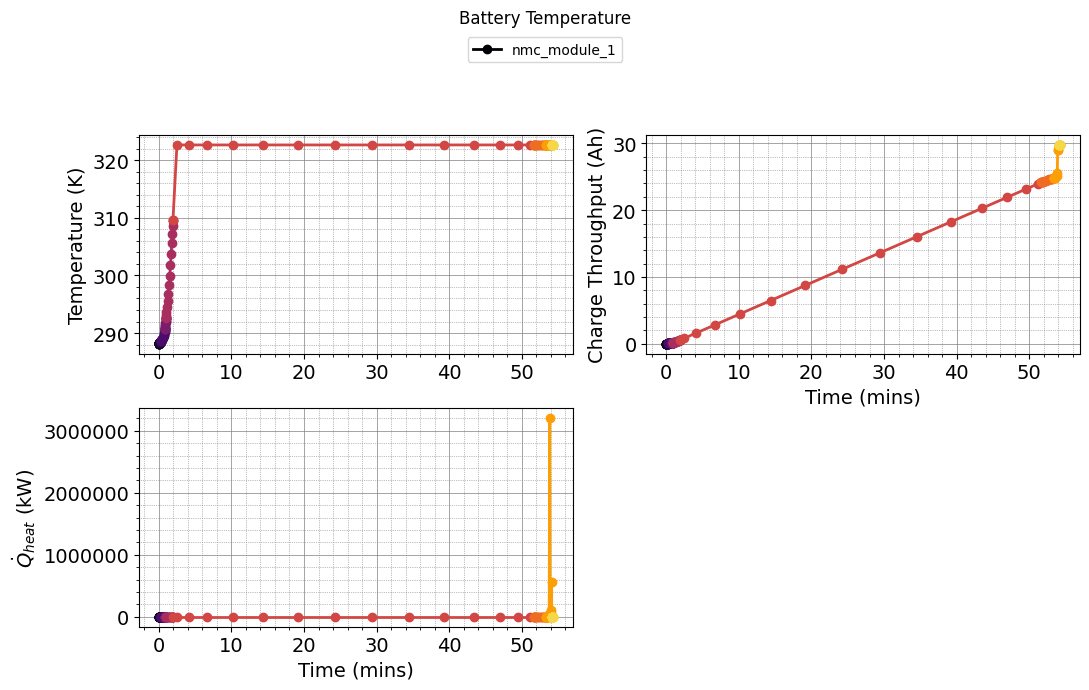
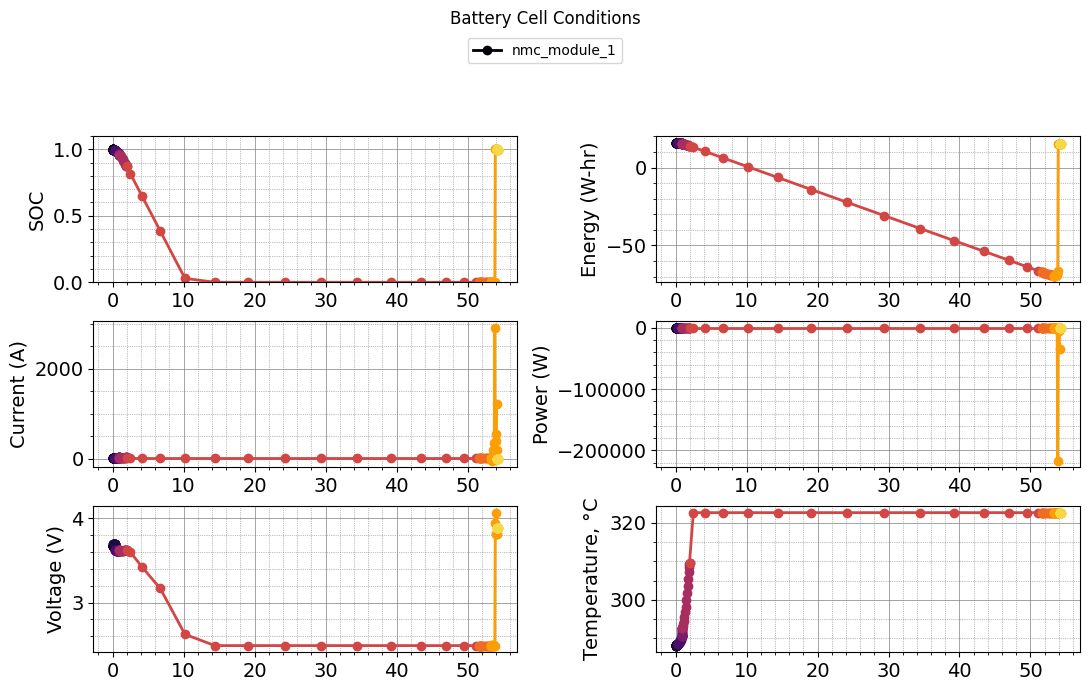
The last function in this file is used to plot the performance results from the mission evaluation. The results shown are not an exhaustive list of RCAIDE outputs, and custom plotting routines can be created.
[8]:
def plot_results(results):
# Plots fligh conditions
plot_flight_conditions(results)
# Plot arcraft trajectory
plot_flight_trajectory(results)
# Plot Aerodynamic Coefficients
plot_aerodynamic_coefficients(results)
# Plot Aircraft Stability
plot_longitudinal_stability(results)
# Plot Aircraft Electronics
plot_battery_temperature(results)
plot_battery_cell_conditions(results)
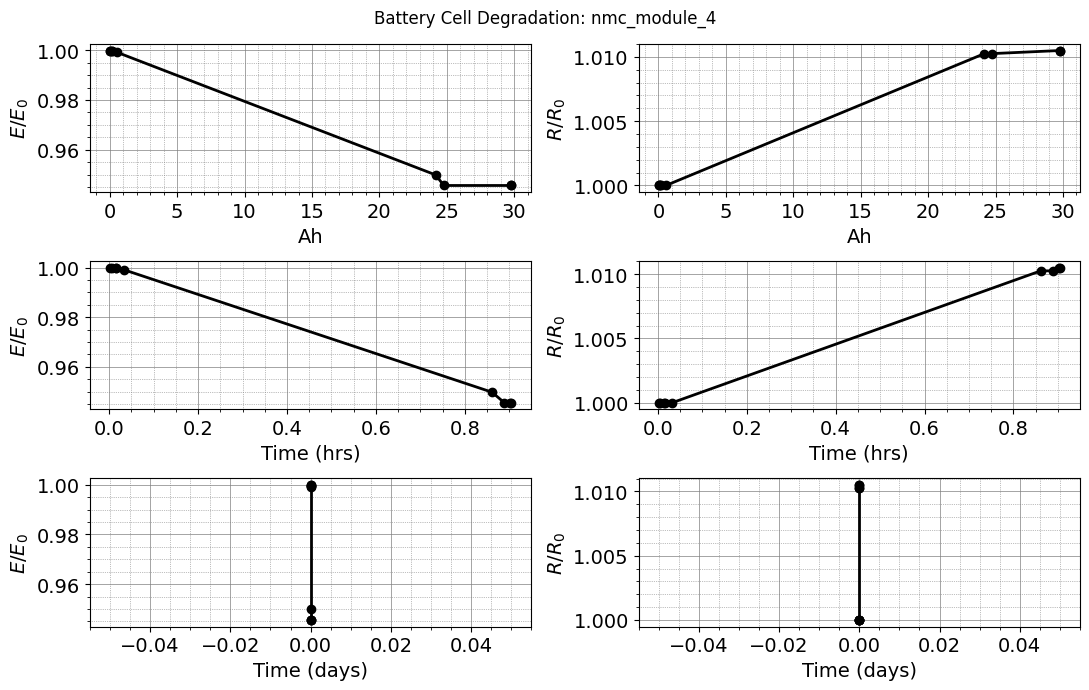
plot_battery_degradation(results)
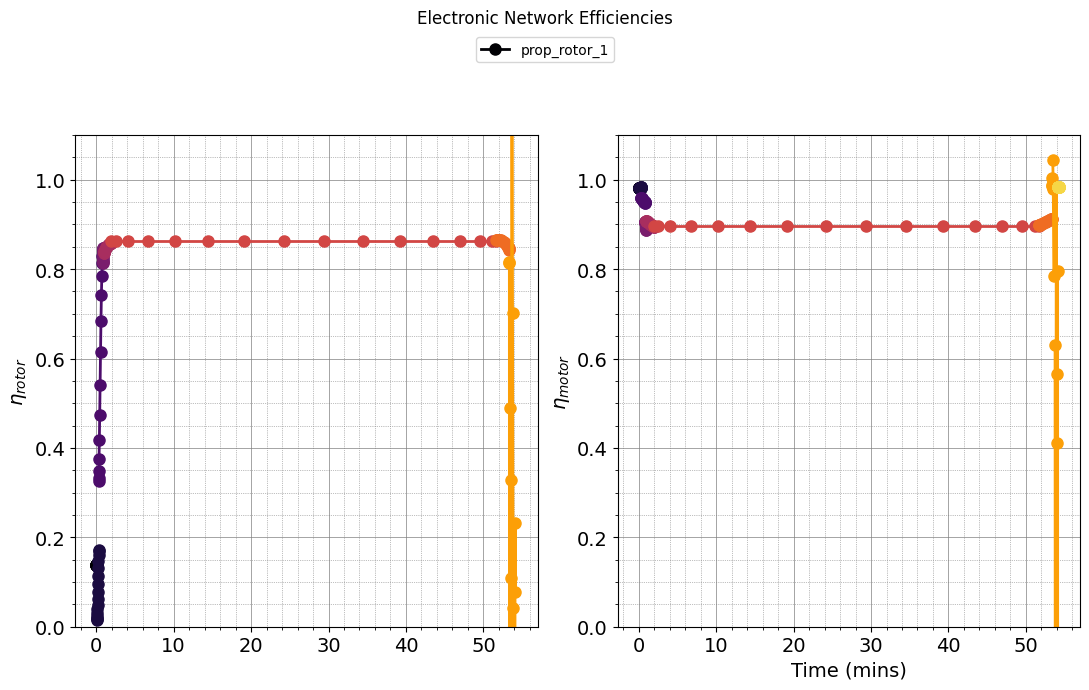
plot_electric_propulsor_efficiencies(results)
# Plot Propeller Conditions
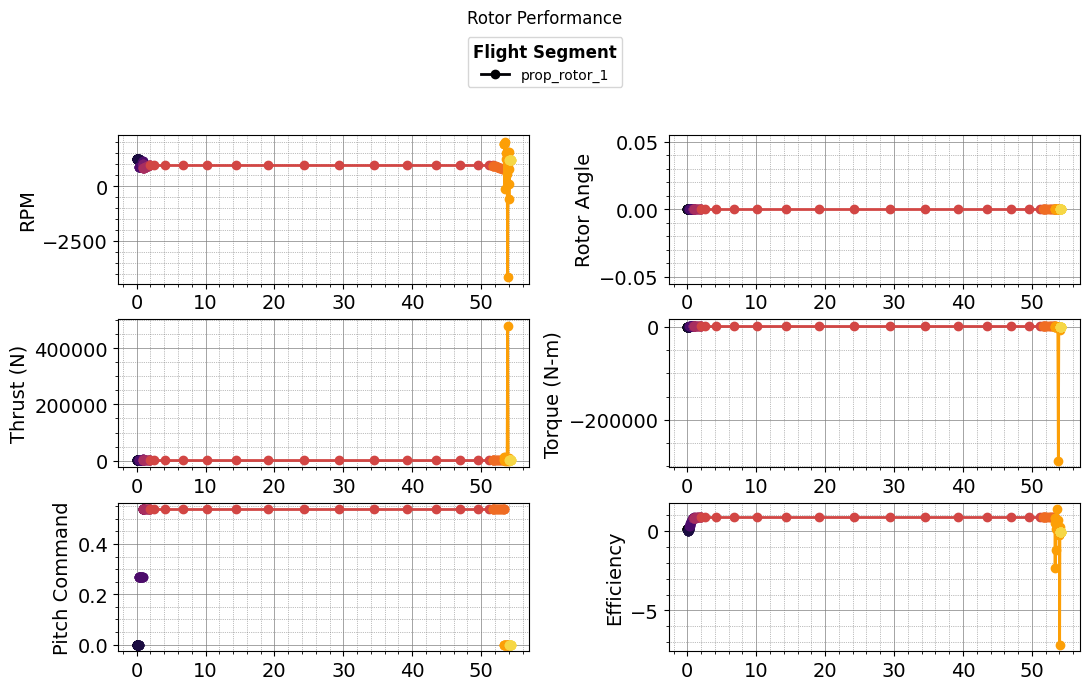
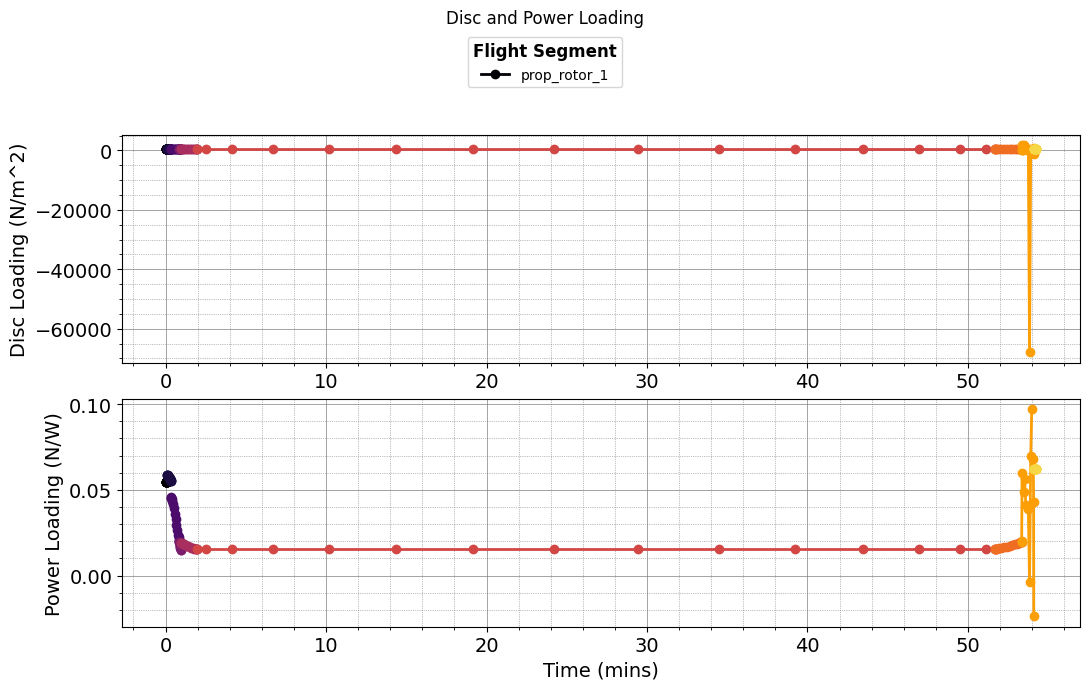
plot_rotor_conditions(results)
return
[9]:
def save_aircraft_geometry(geometry,filename):
pickle_file = filename + '.pkl'
with open(pickle_file, 'wb') as file:
pickle.dump(geometry, file)
return
[10]:
def load_aircraft_geometry(filename):
load_file = filename + '.pkl'
with open(load_file, 'rb') as file:
results = pickle.load(file)
return results
[11]:
def load_rotor(filename):
rotor = load(filename)
return rotor
[12]:
def save_rotor(rotor, filename):
save(rotor, filename)
return
[13]:
# vehicle data
vehicle = vehicle_setup()
# Set up configs
configs = configs_setup(vehicle)
# vehicle analyses
analyses = analyses_setup(configs)
# mission analyses
mission = mission_setup(analyses)
missions = missions_setup(mission)
results = missions.base_mission.evaluate()
# plot the results
plot_results(results)
# plot vehicle
plot_3d_vehicle(vehicle,
show_figure = False
)
Solving Vertical_Climb: | | 0/9 segs [00:00<?, ?seg/s]
Prop-rotor Optimization Successful
Simulation Time: 0.53 mins
Optimum motor design failed. Using slack constraints
Warning: Max Fuel or Max Zero Fuel not defined. Iterating to find these values.
Warning: Computed payload weight is greater than maximum payload weight
Performing Weights Analysis
--------------------------------------------------------
Propulsion Architecture: Electric
Aircraft Type : VTOL
Method : Physics_Based
=== WEIGHT BREAKDOWN REPORT ===
Structural Components:
Component Weight (kg)
----------------------------------------
Wings 132.85
Fuselage 135.31
Empennage 0.00
Landing Gear 51.17
Nacelle 0.00
Booms 0.00
Paint 0.00
----------------------------------------
Total 319.33
Propulsion Components:
Component Weight (kg)
----------------------------------------
Engines 58.03
Thrust Reversers 0.00
Miscellaneous 35.20
Fuel System 0.00
Fuel Tanks 0.00
Electrical Cabling 60.29
Thermal Management 0.00
Battery 1049.66
Motors 316.09
----------------------------------------
Total 1519.28
Systems:
Component Weight (kg)
----------------------------------------
Control Systems 0.00
Apu 0.00
Electrical 0.00
Avionics 16.50
Hydraulics 0.00
Furnishings 82.50
Air Conditioner 38.50
Instruments 0.00
----------------------------------------
Total 137.50
Payload Breakdown:
Component Weight (kg)
----------------------------------------
Passengers 350.00
Baggage 0.00
Cargo 0.00
----------------------------------------
Total 350.00
Operational Items Breakdown:
Component Weight (kg)
----------------------------------------
Misc 0.00
Flight Crew 0.00
Flight Attendants 0.00
Passenger Service 0.00
----------------------------------------
Total 0.00
Overall Summary:
Metric Weight (kg)
----------------------------------------
Operating Empty Weight 1976.11
Payload Weight 350.00
Fuel Weight 0.00
Takeoff Weight 2326.11
Zero Fuel Weight 2326.11
Max Takeoff Weight 2177.00
===============================
Creating aerodynamic surrogate ...
+----------------------------------------------------+
| MISSION SOLVER INITIATED |
+----------------------------------------------------+
Solving Vertical_Descent: |██████████| 9/9 segs [08:02<00:00, 53.60s/seg]
2026-07-17 23:49:21.256 ( 552.607s) [ 7F9D9422BB80]vtkXOpenGLRenderWindow.:1460 WARN| bad X server connection. DISPLAY=
2026-07-17 23:49:21.257 ( 552.608s) [ 7F9D9422BB80]vtkOpenGLRenderWindow.c:645 WARN| Failed to load EGL! Please install the EGL library from your distribution's package manager.
2026-07-17 23:49:21.257 ( 552.608s) [ 7F9D9422BB80]vtkOSOpenGLRenderWindow:149 WARN| libOSMesa not found. It appears that OSMesa is not installed in your system. Please install the OSMesa library from your distribution's package manager.
2026-07-17 23:49:21.258 ( 552.609s) [ 7F9D9422BB80]vtkOpenGLRenderWindow.c:645 WARN| Failed to load EGL! Please install the EGL library from your distribution's package manager.
2026-07-17 23:49:21.259 ( 552.609s) [ 7F9D9422BB80]vtkOSOpenGLRenderWindow:149 WARN| libOSMesa not found. It appears that OSMesa is not installed in your system. Please install the OSMesa library from your distribution's package manager.
[13]:
<pyvista.plotting.plotter.Plotter at 0x7f9d28b70f10>
findfont: Failed to find font weight heavy, now using 700.
Segment did not converge. Segment Tag: Cruise
Error Message:
The number of calls to function has reached maxfev = 200.